armory-library
How to add a new dataset into armory
This file presents two examples of how to add new datasets into armory-library.
Torchvision
The SAMPLE (Synthetic and Measured Paired Labeled Experiment) dataset consists of measured SAR imagery from the MSTAR collection (Moving and Stationary Target Acquisition and Recognition) paired with synthetic SAR imagery.
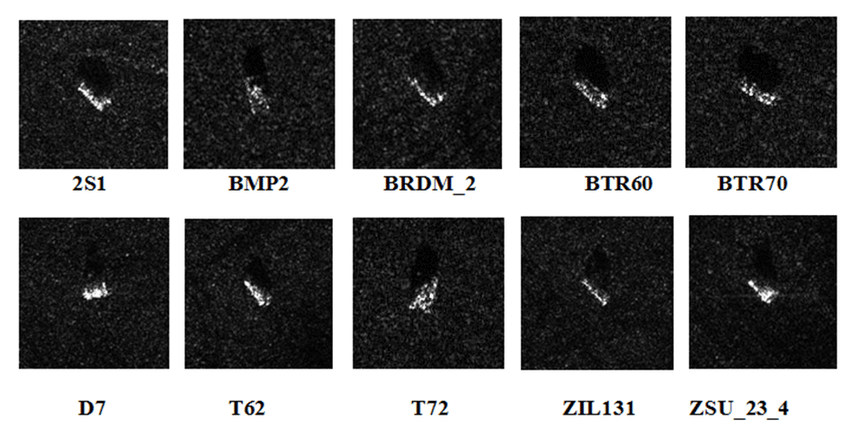
The MSTAR dataset contains SAR imagery of 10 types of military vehicles illustrated in the figure below.
tmp_dir = Path('/tmp')
sample_dir = tmp_dir / Path('SAMPLE_dataset_public')
!git clone https://github.com/benjaminlewis-afrl/SAMPLE_dataset_public $sample_dir
The SAMPLE dataset is organized according to the ImageFolder pattern. The imagery is split into two normalizations – decibel and quarter power magnitude (QPM).
For each normalization type, real and synthetic SAR gray-scale imagery is partitioned into folders according to vehicle type.
|-SAMPLE_dataset_public
| |-png_images
| | |-qpm
| | | |-real
| | | | |-m1
| | | | |-t72
| | | | |-btr70
| | | | |-m548
| | | | |-zsu23
| | | | |-bmp2
| | | | |-m35
| | | | |-m2
| | | | |-m60
| | | | |-2s1
For a Torchvision dataset, we load the dataset using the ImageFolder dataset class, which automatically infers
the class labels based on the directory names. The transform parameter applies a chain of transformations
that resize, normalize and ouput the images as numpy arrays.
import numpy as np
import torchvision as tv
from tv import transforms as T
data_dir = sample_dir / Path("png_images", "qpm", "real")
tv_dataset = tv.datasets.ImageFolder(
root=data_dir,
transform=T.Compose(
[
T.Resize(size=(224, 224)),
T.ToTensor(), # HWC->CHW and scales to 0-1
T.Normalize(mean=(0.5, 0.5, 0.5), std=(0.5, 0.5, 0.5)),
T.Lambda(np.asarray),
]
),
)
Next, we use scikit-learn’s train_test_split
function to generate stratified train and test splits based on the dataset target classes.
from torch.utils.data import Subset
from sklearn.model_selection import train_test_split
# generate indices: instead of the actual data we pass in integers instead
train_indices, test_indices, _, _ = train_test_split(
range(len(tv_dataset)),
tv_dataset.targets,
stratify=tv_dataset.targets,
test_size=0.25,
)
# generate subset based on indices
train_split = Subset(tv_dataset, train_indices)
test_split = Subset(tv_dataset, test_indices)
Next, we wrap the training split into an armory-library dataset with the TupleDataset class.
armory_dataset = armory.dataset.TupleDataset(train_split, ("image", "label"))
Finally, we use the tuple dataset above to define an ImageClassificationDataLoader and
evaluation dataset. Note that the armory-library normalized_scale must match the normalization
transform defined by the Torchvision dataset.
normalized_scale = armory.data.Scale(
dtype=armory.data.DataType.FLOAT,
max=1.0,
mean=(0.5, 0.5, 0.5),
std=(0.5, 0.5, 0.5),
)
batch_size = 16
shuffle = False
dataloader = armory.dataset.ImageClassificationDataLoader(
armory_dataset,
dim=armory.data.ImageDimensions.CHW,
scale=normalized_scale,
image_key="image",
label_key="label",
batch_size=batch_size,
shuffle=shuffle,
)
evaluation_dataset = armory.evaluation.Dataset(
name="food-101",
dataloader=dataloader,
)
Hugging Face
To demonstrate a new Hugging Face dataset, we load the VisDrone2019 dataset object detection dataset. The VisDrone2019 dataset, created by the AISKYEYE team at Tianjin University, China, includes 288 video clips and 10,209 images from various drones, providing a comprehensive benchmark with over 2.6 million manually annotated bounding boxes for objects like pedestrians and vehicles across diverse conditions and locations.
As a first step, we download the validation split to a temporary directory. Note that we do not need to unzip the archive for processing as a Hugging Face dataset.
tmp_dir = Path('/tmp')
visdrone_dir = tmp_dir / Path('visdrone_2019')
visdrone_dir.mkdir(exist_ok=True)
visdrone_val_zip = visdrone_dir / Path('VisDrone2019-DET-val.zip')
The VisDrone 2019 Task 1 dataset is organized as parallel folders of images and annotations containing pairs of image and annotation files, respectively. We then need to designate the object categories and name the fields in the annotation files.
CATEGORIES = [
'ignored',
'pedestrian',
'people',
'bicycle',
'car',
'van',
'truck',
'tricycle',
'awning-tricycle',
'bus',
'motor',
'other'
]
ANNOTATION_FIELDS = [
'x',
'y',
'width',
'height',
'score',
'category_id',
'truncation',
'occlusion'
]
Next, we define the hierarchical features of the dataset by instantiating a datasets.Features object – each feature is named and a Hugging Face data type provided.
features = datasets.Features(
{
'image_id': datasets.Value('int64'),
'file_name': datasets.Value('string'),
'image': datasets.Image(),
'objects': datasets.Sequence(
{
'id': datasets.Value('int64'),
'bbox': datasets.Sequence(datasets.Value('float32'), length=4),
'category': datasets.ClassLabel(num_classes=len(CATEGORIES), names=CATEGORIES),
'truncation': datasets.Value('int32'),
'occlusion': datasets.Value('int32'),
}
)
}
)
We additionally need to define functions load_annotations and generate_examples. The load_annotations function takes a reader for an annotation file, parses an image description into a dictionary and returns the dictionary of image features. The generate_examples generator function uses the specified file reader to iterate over the image in dataset archive. For each image, the generator reads the image file bytes and parses
the associated annotation.
def load_annotations(f: io.BufferedReader) -> List[Dict]:
reader = csv.DictReader(io.StringIO(f.read().decode('utf-8')), fieldnames=ANNOTATION_FIELDS)
annotations = []
for idx, row in enumerate(reader):
category_id = int(row['category_id'])
annotation = {
'id': idx,
'bbox': list(map(float, [row[k] for k in ANNOTATION_FIELDS[:4]])),
'category': category_id,
'truncation': row['truncation'],
'occlusion': row['occlusion']
}
annotations.append(annotation)
return annotations
def generate_examples(files: Iterator[Tuple[str, io.BufferedReader]], annotation_file_ext:str ='.txt') -> Iterator[Dict[str, object]]:
annotations = {}
images = {}
for path, f in files:
file_name, _ = os.path.splitext(os.path.basename(path))
if path.endswith(annotation_file_ext):
annotation = load_annotations(f)
annotations[file_name] = annotation
else:
images[file_name] = {'path': path, 'bytes': f.read()}
for idx, (file_name, annotation) in enumerate(annotations.items()):
example = {
'image_id': idx,
'file_name': file_name,
'image': images[file_name],
'objects': annotation,
}
yield example
We can now create the validation dataset by calling datasets.Dataset.from_generator with the generator above.
visdrone_val_files = datasets.DownloadManager().iter_archive(visdrone_val_zip)
visdrone_dataset = datasets.Dataset.from_generator(
generate_examples,
gen_kwargs={
"files": visdrone_val_files,
},
features=features,
)